
Vript: A Video Is Worth Thousands of Words
Dongjie Yang
1
, Suyuan Huang
2
, Chengqiang Lu
3
, Xiaodong Han
3
,
Haoxin Zhang
3
, Yan Gao
3
, Yao Hu
3
, Hai Zhao
1, ∗
1
Shanghai Jiao Tong University,
2
Beihang University,
3
Xiaohongshu Inc.
1
{djyang.tony@,zhaohai@cs.}sjtu.edu.cn,
2
3
{lusuo,shuweng,haoli9,yadun,xiahou}@xiaohongshu.com
Abstract
Advancements in multimodal learning, particularly in video understanding and
generation, require high-quality video-text datasets for improved model perfor-
mance. Vript addresses this issue with a meticulously annotated corpus of 12K
high-resolution videos, offering detailed, dense, and script-like captions for over
420K clips. Each clip has a caption of ~145 words, which is over 10x longer
than most video-text datasets. Unlike captions only documenting static content in
previous datasets, we enhance video captioning to video scripting by documenting
not just the content, but also the camera operations, which include the shot types
(medium shot, close-up, etc) and camera movements (panning, tilting, etc). By
utilizing the Vript, we explore three training paradigms of aligning more text
with the video modality rather than clip-caption pairs. This results in Vriptor, a
top-performing video captioning model among open-source models, comparable to
GPT-4V in performance. Vriptor is also a powerful model capable of end-to-end
generation of dense and detailed captions for long videos. Moreover, we introduce
Vript-Hard, a benchmark consisting of three video understanding tasks that are
more challenging than existing benchmarks: Vript-HAL is the first benchmark
evaluating action and object hallucinations in video LLMs, Vript-RR combines
reasoning with retrieval resolving question ambiguity in long-video QAs, and
Vript-ERO is a new task to evaluate the temporal understanding of events in long
videos rather than actions in short videos in previous works. All code, models, and
datasets are available in https://github.com/mutonix/Vript.
1 Introduction
With the rapid development of multimodal learning [
2
,
3
,
4
], researchers are increasingly focusing
on understanding [
5
,
6
,
7
] and generation [
8
,
9
,
10
] of the video modality. This has triggered a
surge in demand for high-quality video-text datasets containing high-resolution videos and detailed
captions. Compared to image-text pairs [
11
,
12
], video-text pairs are harder to obtain and annotate.
As a video has an additional temporal dimension, it contains more information than a single image.
Additionally, a video often comprises numerous events, and each event can consist of several scenes.
For instance, a travel vlog might feature events such as preparing for the journey and visiting various
destinations. Each event can be depicted using different shots. Video captioning takes more labor for
annotators to check through the whole video and write down thousands of words to annotate every
detail. Therefore, most previous video-text datasets only have short and coarse-grained descriptions
for short video clips. For example, as shown in Table 1, WebVid-10M [
13
] and Panda-70M [
14
]
comprise captions of 1~3 sentences for video clips shorter than 15 seconds.
∗
Corresponding author.
Preprint. Under review.
arXiv:2406.06040v1 [cs.CV] 10 Jun 2024
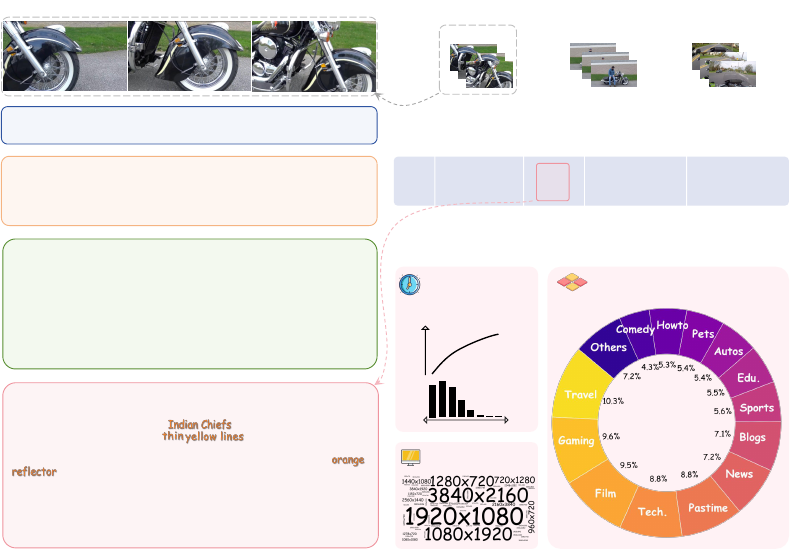
[Panda-70M] A black motorcycle is parked on the side of the road, and
the swooping fenders are visible.
[VideoChat2] The video shows a motorcycle parked on the road. The
motorcycle is black in color and has a white wheel. The video also shows the
motorcycle’s front wheel and the tire. The motorcycle is parked on the
road and appears to be in good condition.
[LLaVA 1.6 34B] The video captures a close-up view of a motorcycle
wheel in motion. The style of the video is a time-lapse or stop-motion
sequence, showcasing the wheel's movement from a stationary position to a
rolling state. The motorcycle, with its black fender and silver spokes, is
the central focus of the video. The wheel is initially stationary, with the
spokes aligned in a straight pattern. As the video progresses, the wheel
begins to spin, with the spokes creating a circular motion. The background,
featuring a grassy area and a brick wall, provides a contrast to the
motorcycle, emphasizing its motion.
[Vript] The video features a close-up view of the front part of a
motorcycle, focusing on the wheel and fender area. It is a tribute bike,
meant to honor the design of the from the 1940s. The fender
is painted black with elegant, following its curvature,
adding a vintage aesthetic to the bike. The white-walled tire is mounted on
a spoked wheel, reflecting classic motorcycle design elements. The
adds a touch of modern safety to the otherwise retro appearance.
The environment appears to be a quiet outdoor setting, possibly a parking
lot with grass in the background, under an overcast sky which diffuses the
natural light evenly, minimizing shadows and highlights on the motorcycle's
surfaces. Overall, there's a sense of stillness, with no movement or action
apart from the slight camera zoom.
Scene-008
Scene-021 Scene-031
...
...
...
...
NO.
008
Title
Shot
CameraContent
Tribute
Motorcycle's
Vintage Details
Close-up shots of
motorcycle front
wheel and fender.
Camera pans with
subtle zooming out
from the wheel.
...
...
...
...
...
...
...
...
...
...
(a) Detailed Captions (b) Dense Captions as A Video Script
(c) Diversity
Caption Len &
Video Duration
Resolution
Category
5s 2.9h
Caption Len (Word)
100
150K
Figure 1: (a) We present a comparison between captions from our Vript and those produced by large
multimodal models (LMMs). Compared to captions with hallucinations (marked in red) from LLaVA
[
1
], Vript consists of the most detailed and accurate descriptions (marked in orange) for the videos.
(b) Videos in Vript are densely annotated akin to video scripts, encompassing thousands of words. (c)
Vript provides captions for open-domain videos in high resolution and various aspect ratios.
To address the limitations of existing datasets, we construct a fine-grained video-text dataset called
Vript, including 12K high-resolution videos (over 420K clips) annotated by GPT-4V [
15
]. The
annotation process of Vript is inspired by the format of video scripts. A video script organizes the
process of shooting a video consisting of multiple scenes. For each scene, we care not only about
the content but also the camera operations, including shot types (medium shot, close-up, etc) and
how the camera moves (panning, tilting, etc). Unlike most previous video-text datasets [13, 16], we
densely annotate the untrimmed videos, and each scene in the video has a long caption of ~145 words.
Besides the vision modality, we transcribe the voice-over into text and put it along with the video title
to supplement background information, which greatly reduces the hallucinations in the captions.
Existing studies [
17
,
10
,
1
] report that detailed captions help improve better vision-language alignment.
Most datasets [13, 14, 6] have short captions and are not densely annotated. Therefore, we can only
align one short video clip with one short caption at a time during the training. To align more text with
the video, we explore three paradigms that are not commonly used in vision-language alignment for
videos: 1) Video-script alignment: We sample multiple successive scenes to form a longer video and
concatenate the corresponding captions to create a "sub-script" as a longer text target. 2) Voice-over
transcription: We combine the voice-over transcription and the video as input. 3) Video timestamp:
We introduce the timestamps of both voice-over and video as additional information. Based on these,
we train a video captioning model, dubbed Vriptor. Vriptor is good at generating dense captions
both for short and long videos end to end and reaches SOTA performance in video captioning among
open-source models.
Moreover, we propose Vript-Hard, a video understanding benchmark consisting of three tasks that
are more challenging than most benchmarks [18, 16, 19]:
1.
1) Vript-HAL (Hallucination Evaluation): Vript-HAL is the first benchmark to compre-
hensively evaluate object and action hallucinations in video LLMs, providing the detailed
ground truth 25x longer than MSR-VTT [16].
2
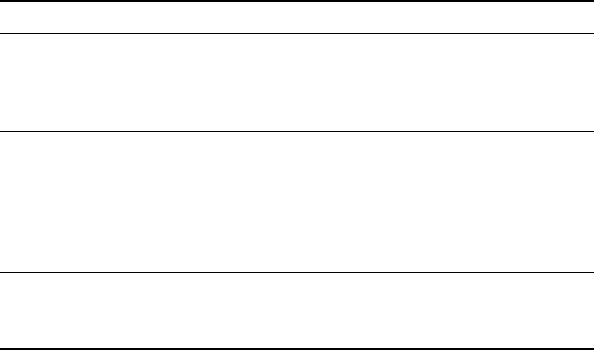
Table 1: Comparisons between Vript and other video-text datasets. We divide the datasets into
three parts. For the first part, the captions of these datasets come from subtitles (ASR) or descriptions
scraped from the Internet. For the second part, the captions are collected by crowdworkers. For the
third part, the captions are generated by multimodal models automatically.
Dataset Domain Text Len Clips Duration Resolution
HowTo100M [21] Open 4.0 136M 134Kh 240p
ACAV100M [22] Open - 100M 278h -
HD-VILA-100M [23] Open 32.5 103M 371Kh 720p
WebVid-10M [13] Open ~12 10M ~52Kh 360p
MSVD [24] Open 8.7 1970 5.3h -
MSR-VTT [16] Open 9.3 10K 40h 240p
DiDeMo [25] Flickr 8.0 27K 87h -
ActivityNet [26] Action 13.5 100K 849h 144p-720p
YouCook2 [27] Cooking 8.8 14K 176h -
VATEX [28] Open 15.2 41K ~115h -
HD-VG-130M [6] Open ~10 130M ~180Kh 720p
Panda-70M [14] Open 13.2 70.8M 167Kh 720p
Vript (Ours) Open ~145 420K 1.3Kh 720p-2K
2.
2) Vript-RR (Retrieval then Reasoning): Long video QA benchmarks[
18
,
19
] ask ques-
tions about details in long videos that easily lead to ambiguity because the answers may vary
in different timestamps. To solve this issue, we construct a long video reasoning task dubbed
Vript-RR, by giving a hint for locating the relevant scene and then asking questions about
the scene. Vript-RR features harder questions that need multi-hop reasoning and longer
videos (2min~40min) than previous long video benchmarks, e.g., EgoSchema [18] (3min).
3.
Vript-ERO (Event Re-ordering): Different from previous benchmarks [
7
,
20
] of temporal
understanding that only care about chronological order of actions in short videos, we build
a new challenging task called event re-ordering, requiring the model to sequence sampled
events in long videos. In Vript-ERO, each video contains over 40 scenes on average and
models need to re-order three of them in the correct order.
To sum up, we construct a high-quality video-text dataset called Vript, with dense and detailed
captions for videos. Based on Vript, we train a top-performing video captioning model dubbed Vriptor.
We propose Vript-Hard, a challenging video understanding benchmark that solves deficiencies in
previous benchmarks, consisting of three tasks: Vript-HAL, Vript-RR, and Vript-ERO.
2 Related Work
Video-text Dataset Building powerful video foundation models [
10
,
29
,
30
,
1
,
17
] requires high-
quality video-text datasets for vision-language alignment. In Table 1, we compare video-text datasets
using different annotation methods. Datasets such as HD-VILA-100M [
23
] utilize subtitles as
captions, which can not precisely describe videos most of the time. Most video-text datasets, e.g.,
MSR-VTT [
16
] and ActivityNet [
26
], are annotated with human labor, giving the most accurate
descriptions, yet it is challenging to scale up the dataset size. Recent datasets like HD-VG-130M [
6
]
leverage large multimodal models (LMMs) to automatically generate captions but only short captions
are provided due to the limitation of the model’s ability. Compared to the above, Vript provides dense
and detailed captions 10x longer for untrimmed videos by using GPT-4V [15].
Video Understanding Benchmark Existing benchmarks [
16
,
24
,
19
,
18
,
7
] including captioning
and QA tasks evaluate models on the short videos (<5min) and test the superficial understanding of
the videos rather than a deeper understanding of the details in the videos. In contrast, Vript-Hard
scales up the videos to be much longer, e.g., Vript-RR (2min~40min) and Vript-ERO (2min~2h)
and requires models to watch videos more carefully, e.g, Vript-HAL evaluating object and action
hallucinations in the video LLMs and Vript-RR testing multi-hop reasoning ability.
3

3 Refine Video Captioning into Video Scripting
In the construction of Vript, our goal is to annotate a video as detailed as possible so that we can
even visualize the video via the text description. For each scene in the video, we describe events with
detailed actions and interactions rather than coarse-grained descriptions. Besides events, we record
more details: the appearance of all objects and characters, environment, light, video style, etc.
In addition to the static description above, we inspect how the camera moves and shoots the scenes
(Camera language). Previous works [
14
,
6
,
13
] leverage the pipeline of describing an image to
describe a video, ignoring the cameras. For a video clip about a man riding a bike, if we only describe
what is in the frames, we can say "A man in a dark blue shirt is riding a black bike along the road".
However, to be specific, we actually observe "As the camera pans to a close-up shot, a man in a
dark blue shirt is riding a black bike. As the camera zooms out, we can see an overview of a man
riding along the road with mountains behind him." Thus, to enhance the description of a video, it is
necessary to record the camera language in addition to the content.
Combining both static description and camera language is like how we write a scene in a video
script. In Vript, following the format of the video script, we first split the video into scenes using the
PySceneDetect
2
and annotate each scene with static description and camera language, dubbed Video
Scripting. We select 10K YouTube long videos from HD-VILA-100M [
23
] and collect 1.5K short
videos from YouTube Shorts and TikTok from the Internet. We leverage the advanced multimodal
model, GPT-4V [15], to annotate the following items for each scene: 1) title: a brief summarization
of the scene within 10 words; 2) content: detailed description of around 150 words; 3) shot type: full
view, close-up, etc; 4) camera movement: panning, zooming, etc. To make a "full" script of a video,
we densely annotate the untrimmed videos (lasting from 5s to 2.9h) from the start to the end.
Besides video frames, we also add more external information to assist the annotation. We leverage
the voice-over transcribed by the Whisper model [
31
] and also the video title, which helps the model
to know what the original video is about. This external information greatly reduces the hallucinations
and improves the caption granularity, helping the models to better understand what is happening in
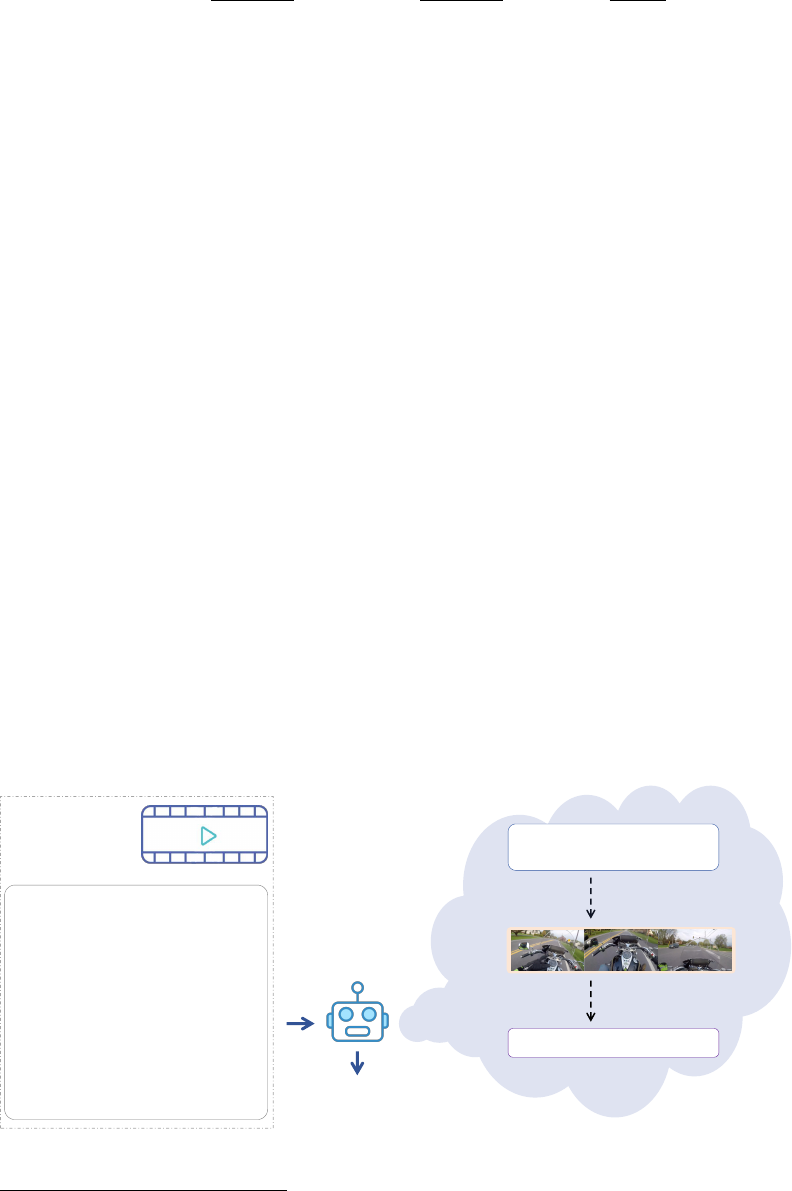
the video rather than what they have seen visually. For example, as shown in Figure 2, by watching
the frames of Scene-010, we can not infer what ingredients are added to the bowl with the spoon and
the squeeze bottle. The highlighted words from the voice-over illustrate they are mayonnaise and
mustard, which improves the granularity of the caption shown in the top-right panel.
4 Vriptor: A Long Video Is Worth Thousands of Words
In the common paradigm of vision-language alignment for video foundation model training, assuming
the batch size is 1, we align one video with one text caption. Existing video-text datasets like
Panda-70M [
14
] and WebVid-10M [
13
] only have brief captions where inadequate details result in
suboptimal vision-language alignment. To alleviate this issue, we showcase how we can align more
text with videos by training on the Vript dataset. We explore three not commonly used paradigms
beyond the common one. Based on these, we train the Vriptor, a powerful model for video captioning,
which reaches SOTA performance among open-source video LLMs.
4.1 Method
Video-Script Alignment If videos are densely annotated, a possible way to increase the amount of
text for alignment is to concatenate captions of multiple successive clips. Though clips can be easily
concatenated to create a longer video, captions are annotated separately so that the concatenated
caption may not have coherence in the semantics. Inspired by video scripts, we reformulate the
successive captions into scenes of the video script. In the right panel of Figure 2, a script in Vript with
multiple scenes is coherent in the semantics despite they are annotated separately because: 1) each
scene caption is very detailed and has similar descriptions for the shared background or context and 2)
title of each scene acts as a separator rather than concatenating them directly. In Vript, We can easily
sample several successive clips to create a "sub-script", e.g., 10 successive clips with corresponding
"sub-script" containing about 1.5K words, which is nearly 100x longer than short captions.
2
https://github.com/Breakthrough/PySceneDetect
4
1) 1 scene (only vision)
[67.8, 71.4] So the first thing I'm going
to do is chop up two hard-boiled eggs.
[71.4, 75.7] And I'm going to add some
mayonnaise and some mustard.
[75.7 80.1] Then I'm going to mix that
all up until it's all into egg salad.
[Scene-010]
[Scene-011]
Voice-over Transcription
...
Scenes
[Scene-010]
Duration [67.8, 80.1]
[Scene-011]
Duration [80.1, 85.5]
2) 1 scene + voice-over
+
...
3) Many scenes (concat)
4) Many scenes (concat) +
voice-over (concat)
+
...
Video
LLM
Describe the whole video
Describe the video
scene by scene
[Scene 1 Children
Making Egg
Salad at Home]
(Duration [67.8, 80.1])
The clip showcases a top-down
view of a food preparation
process on a pink, textured
mat, with two yellow emoji-
patterned napkins on each
side ... child's hands working ...
a d d m a y o n n a i s e f r o m a
squee z e bottl e and s quirt
yellow mustard over the eggs ..
The clip showcases a
top-down view of ...
[Scene 2 Preparing
Plate with Paper Towel
for Cooking]
(Duration [80.1, 85.5])
In a brightly lit setting ...
Figure 2: The input and output combinations of Vriptor training.
Voice-over Transcription We add voice-over transcription as the additional speech modality.
As the Vript is annotated with joint input of voice-overs and video frames, the captions contain
information that comes from the voice-over as shown in Figure 2.
Video Timestamp Commonly video LLMs [
7
,
32
] implement a certain sampling strategy to extract
multiple frames as the video input. Some models [
7
,
32
] that use a strategy of sampling a fixed
number of frames, the models treat all videos as videos with the same duration. These models are
weak in time awareness as they only know the order of frames but do not know how long the frames
last. We find that timestamps are crucial for the video-script alignment of multiple scenes. As shown
in Figure 2, we add two kinds of timestamps in the text format: voice-over timestamps in the input
and video timestamps in the output caption. Predicting the timestamps of the video helps the model
to know the start and the end of each scene.
4.2 Experiment and Analysis
We aggregate these paradigms to train Vriptor. In Figure 2, we combine four types of inputs and
outputs: 1) 1 scene
→
1 caption; 2) 1 scene + voice-over
→
1 caption; 3) many scenes
→
1 script; 4)
many scenes + voice-over
→
1 script. We add the timestamp information for all four types. We train
the Vriptor based on ST-LLM [
33
] for two stages. We evaluate the captioning ability of the Vriptor
on the Vript-HAL and the MSR-VTT [
16
], where the Vript-HAL and metrics are introduced in Sec
5.1 later. More details of training Vriptor can be checked in Appendix D.
Video-Script Alignment Helps Model Watch More As shown in Figure 2, Vriptor supports two
types of instructions: describe the whole video and scene by scene. For the whole-video instruction,
Vriptor gives a general description of 100~150 words. For the scene-by-scene instruction, Vriptor
gives a dense description of the video with each scene of 100~150 words. In Table 2, compared to the
whole-video description, Vriptor gives more details of the video in the scene-by-scene description
with an increasing recall in the Vript-HAL and the MSR-VTT as the number of output scenes
increases. However, as the captions get longer and more detailed (more scenes), models are easier to
generate hallucinations with a drop in precision. In Figure 3, we showcase the ability of Vriptor to
caption long videos with longer texts. Models like VideoChat2 [
7
] only give a relatively fixed length
of captions for videos of different lengths. Vriptor-S (scene-by-scene) can scale up the caption length
as the video gets longer, just like writing a longer video script.
5
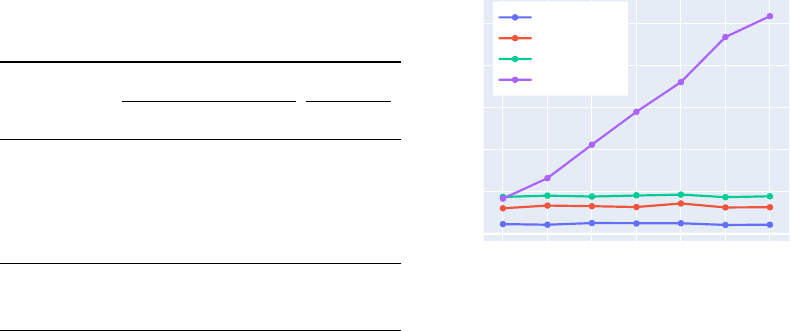
Table 2: Different strategies of video-script align-
ment and voice-over transcription.
Strategy
Vript-HAL MSR-VTT
Precision Recall F1 Recall
2 scenes 75.8 40.9 53.1 122.0
3 scenes 74.1 49.5 59.4 135.8
4 scenes 72.3 55.8 63.0 138.1
5 scenes 71.4 57.5 63.7 139.5
Whole 79.1 26.8 40.0 83.0
Whole (voice) 80.3 27.7 41.1 -
3s
15s
40s
2m
6m
15m
40m
0
200
400
600
800
1000
VideoChat2
ST-LLM
Video-LLaMA
Vriptor-S
Video Duration
Caption Length
Figure 3: Caption lengths for videos of differ-
ent durations.
Voice-overs Help Model Understand What They Are In the last two rows in Table 2, we
showcase the increments in both precision and recall that the model can give more detailed and
accurate descriptions with the help of voice-over. We also observe a 14% increment in the proportion
of proper nouns of all nouns in the captions. This suggests that the model is capable of inferring the
names of objects rather than only their appearance by analyzing the voice-over.
Timestamps Help Model Know the Starts and the Ends To verify the effectiveness of adding
timestamps, we also train another model without adding timestamps. Comparing these two models,
we find the improvement is minor in whole-video description but significant in scene-by-scene
description. The model with timestamps is less likely to generate duplicated descriptions from
previous scenes because it can understand the start and end of each scene and identify which scene
corresponds to which period. Besides, the model with timestamps gives more detailed captions with
a 12% higher recall on Vript-HAL while the model without timestamps is more likely to forget to
describe some parts of the videos.
5 Vript-Hard
As multimodal models advance in performance, a more challenging benchmark is required to evaluate
their capabilities. We propose a hard video understanding benchmark, dubbed Vript-Hard, consisting
of three challenging tasks: HAL (Hallucination Evaluation), RR (Retrieval then Reasoning), and ERO
(Event Re-ordering). We evaluate a large range of image LLMs, namely BLIP2 [
34
], InstructBLIP
[
35
], Qwen-VL [
36
], LLaVA 1.6 34B [
1
], and video LLMs, namely VideoChatGPT [
20
], Video-
LLaMA [
30
], VideoChat [
29
], VideoChat2 [
7
], ST-LLM [
33
]. We also evaluate sophisticated
close-source models, namely Claude 3-Sonnet and Opus [
37
], GPT-4V [
15
]. More details about
Vript-Hard can be checked in Appendix E.
5.1 Vript-HAL: A Hallucination Evaluation Benchmark for Video LLMs
Evaluating Hallucinations in Video LLMs Previous researchers [
38
,
39
,
40
] have explored
methods to detect and evaluate hallucinations of powerful image LLMs. Similar to image LLMs,
current video LLMs have a deeper understanding of videos and a stronger ability to generate more
detailed captions for videos but also suffer from severe hallucinations. If we ask the video LLMs
to describe a video, they may misread the objects and actions and generate a description with
hallucinations. Captioning benchmarks, e.g., MSR-VTT [
16
] and MSVD [
24
], consist of short
captions of no more than 10 words, giving superficial video descriptions without details. Thus we can
not use them to evaluate hallucinations if many objects and actions are not included in the ground truth.
To fill this gap, we construct Vript-HAL, a benchmark to evaluate object and action hallucinations in
the video captions. Each video in Vript-HAL is annotated with two captions separately, approximately
250 words each, which are 25x longer than those in MSR-VTT. By building such strong ground truth
captions, we can check if the video LLMs generate hallucinations in the captions.
6
BLIP2
InstructBLIP
Qwen-VL
LLaVA 1.6 34B
VideoChat
VideoChat2
VideoChatGPT
VideoLLaMA
ST-LLM
GPT4V
Claude 3 Sonnet
Claude 3 Opus
Vriptor-W
Vriptor-W (voice)
Vriptor-S
Vriptor-S (voice)
0
10
20
30
40
50
60
65
70
75
80
Image LLM
Video LLM
Closed-source
Vriptor
recall
precision
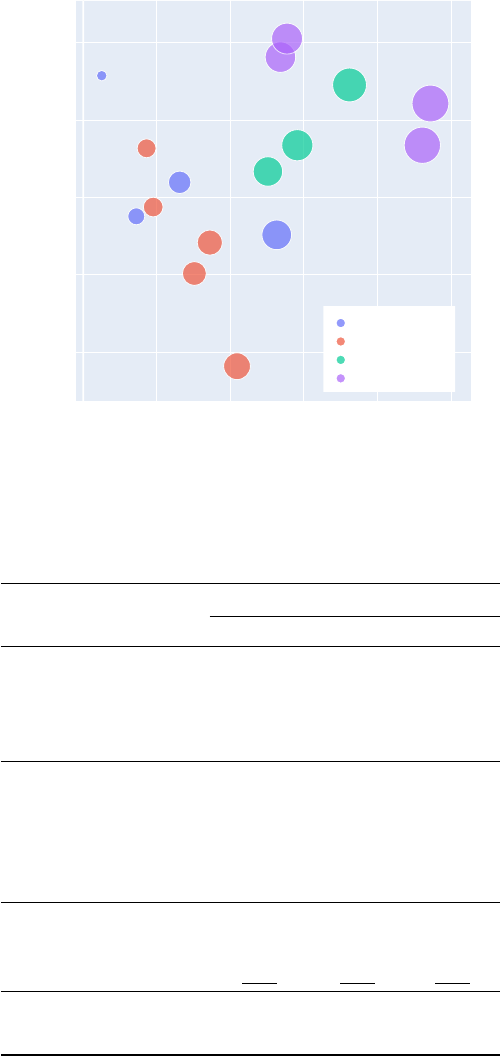
Figure 4: The precision and recall scores of various models on Vript-HAL. The sizes of the circles
stand for the F1 values.
Table 3: The full results of various models in Vript-HAL. "voice" means whether the voice-over
transcription is utilized for captioning.
Model
Vript-HAL
Precision Recall F1
BLIP2 [34] 77.9 2.5 4.8
InstructBLIP [35] 71.0 13.1 21.8
Qwen-VL [36] 68.8 7.2 12.4
LLaVA 1.6 34B [1] 67.6 26.3 37.8
VideoChatGPT [20] 69.4 9.5 16.7
Video-LLaMA [30] 65.1 15.1 24.5
VideoChat [29] 59.1 20.9 30.9
VideoChat2 [7] 73.2 8.6 15.4
ST-LLM [33] 67.1 17.2 27.3
Claude 3-Sonnet [37] 71.7 25.1 37.2
Claude 3-Opus [37] 73.4 29.1 41.7
GPT-4V [15] 77.3 36.2 49.3
Vriptor-W/voice (Ours) 79.1/80.3 26.8/27.7 40.0/41.1
Vriptor-S/voice (Ours) 73.4 /76.1 46.1/47.2 56.6/58.3
Hallucination Evaluation Metrics Traditional metrics, such as BLEU [
41
], ROUGE [
42
], and
CIDEr [
43
], focus on word-for-word precision by measuring the token similarity between the
predicted and ground truth texts, which are not suitable for evaluating if the objects and actions are
correctly described. Following previous works [
44
,
45
], we evaluate whether the nouns (objects) and
verbs (actions) are correctly described in the captions by using the precision score. In addition to
evaluating accuracy through precision, it is noted that various models give descriptions varying in
length and detail. We observe that shorter captions typically include fewer details thus tending to
contain fewer hallucinations. To balance this, we introduce the recall score, which measures how
many objects and actions in the ground truth are correctly described. We calculate the F1 score as the
7
comprehensive score of hallucination evaluation as follows:
P(p, g) =
#{p ∩ g}
#{p}
, R(p, g) =
#{p ∩ g}
#{g}
, F
1
= 2 ·
P · R
P + R
, (1)
where
#{p}
and
#{g}
represent the number of objects and actions described in the prediction and
ground truth caption respectively. We leverage the SpaCy
3
to extract the nouns, proper nouns, and
verbs as the objects and actions.
#{p ∩ g}
represents the number of objects and actions that are
correctly described in the prediction. We then encode the objects and actions into word embeddings
using the sentence-transformers
4
. Instead of using the exact match, for each object or action, we
consider it to be correctly described if the cosine similarity between the prediction and the ground
truth is greater than 0.5. It is noted that using similarity may result in many-to-one matching because
objects or actions with similar meanings in the prediction are all matched by one object or action in
the ground truth, potentially yielding a score greater than 1 if the prediction is much longer than the
ground truth, e.g., the recall score in MSR-VTT in Table 2.
Evaluation We evaluate a large range of models on Vript-HAL, including image LLMs supporting
multiple image inputs and video LLMs. From Figure 4, we observe some models, e.g., BLIP2 and
VideoChat 2 have fewer hallucinations only because they give shorter captions containing fewer
details. Vriptor-W (whole-video) giving general descriptions has a higher precision while Vript-S
(scene-by-scene) giving dense descriptions describes more details in the videos with a higher recall.
Both models have performance on par with the GPT-4V in video captioning.
5.2 Vript-RR: A Hard Reasoning Benchmark for Long Video Understanding
Retrieving the Scene then Reasoning the Answer If we ask about details in the long video, we
may encounter ambiguity in the questions that: 1) there are multiple answers that match the question
in the different timestamps; 2) the answer changes as time goes on. The ambiguity issue can be
commonly seen in the long video understanding benchmarks, e.g., EgoShecma [
18
]. We propose
Vript-RR (Retrieval then Reasoning), a long video reasoning benchmark that has no such worries.
Different from these benchmarks [
19
,
7
,
18
] that only provide questions, we first give a hint for the
model to locate the scene in the video that the question refers to. The hint is a detailed description of
the relevant scene. We then ask the question based on the scene, which eliminates the ambiguity. In
practice, as shown in Figure 5, we input the hint and the question along with the entire video together,
and the models directly output the answer, which is an end-to-end process. We carefully craft the
hints to ensure the model can not find short paths through hints. We design various questions for
Vript-RR to evaluate the different capabilities of video LLMs, where each question requires at least
one reasoning step or additional processing, e.g., text reading, and meticulous inspection of details.
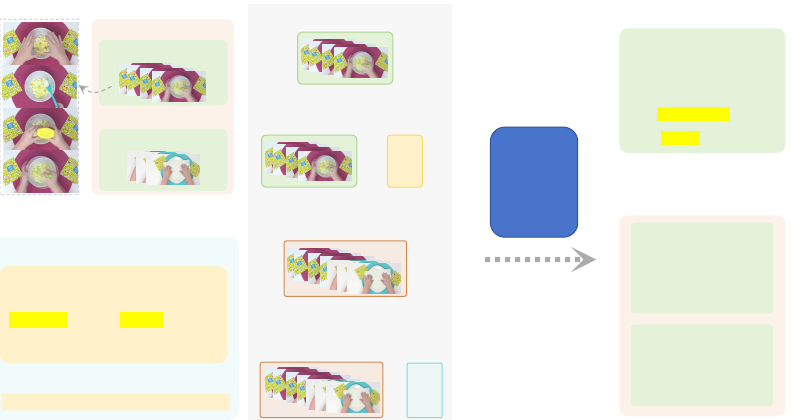
In the video, a scene shows a rider
operating a motorcycle from a
first-person perspective. The bike
has a classic design with chrome
detailing and black leather
elements. The rider's hands are
visible, wearing bright gloves,
manipulating the bike's controls.
What is the color of the rider's
clothing from the side mirror of the
motorcycle?
Hint: In the video, a scene
shows a rider operating ...
Long
video
Text
What scene in the
video fits the hint?
question: What is the color ...
Based on Scene-031
The answer is black
and light yellow/green.
Figure 5: The overview of answering the question in Vript-RR, which is an end-to-end process.
3
https://spacy.io/. We use the largest model en_core_web_lg.
4
https://www.sbert.net. We use the top-performing embedding model all-mpnet-base-v2.
8
Evaluation Vript-RR consists of two subtasks differing in the video inputs: one is inputting the
whole videos and another is directly inputting the related scenes. Vript-RR provides questions both in
multiple-choice and open-ended formats. For the open-ended outputs, we leverage the GPT-4 turbo
[
15
] as the judge [
46
] to evaluate if the answer is correct by comparing the prediction with the ground
truth. As shown in Table 4, the "Scene" columns represent using the related scene as input, which is
an easier task because the models do not need to retrieve across the entire video to find the related
scene. The results of the "Scene" columns mainly showcase the models’ video reasoning ability. For
"Whole" columns using the whole video as input, we require models to first find the relevant scenes
using the hint, requiring the additional long video understanding ability. The closed-source models
like GPT-4V and Claude 3 have better performance than open-source video LLMs.
Finding A "Needle" In A "Timestack" For each video in Vript-RR, we design the questions for
scenes extracted from four various timestamps, corresponding to 15%, 40%, 60%, and 85% of the
video respectively. We want to explore whether the temporal positions of scenes in the long video will
influence the results of Vript-RR. We describe it as finding a "needle" in the "timestack", whose name
is derived from the "needle-in-a-haystack" task [
47
] for testing the long-context ability of LLMs.
We require models to go through visual tokens instead of text tokens to find the "needles" (related
scenes). In the "needle-in-a-haystack" task, there is a phenomenon that the model performance drops
significantly when the "needle" falls between 15% and 85% of the long context, particularly when
the text length exceeds at least 16K tokens. As shown in Figure 6 (a), though the number of visual
tokens is significantly smaller than 16K, performance drops are also observed for most of the models
if the scenes fall in the middle of the visual tokens (40% and 60% of the video).
Table 4: The metric of Vript-RR and Vript-ERO is accuracy. In Vript-RR, "M" and "O" stand for
multiple-choice and open-ended questions respectively. In Vript-ERO, "@x" denotes the number of
positions correctly predicted in the order of three shuffled scenes at different timestamps.
Model
Vript-RR Vript-ERO
Scene-M Scene-O Whole-M Whole-O @1 @2 @3
VideoChatGPT [20] 34.2 28.9 29.6 17.8 - - -
Video-LLaMA [30] 38.2 19.7 28.3 14.5 - - -
VideoChat [29] 33.6 23.0 22.4 15.1 46.2 17.1 17.1
VideoChat2 [7] 52.0 32.2 42.1 22.4 - - -
ST-LLM [33] 43.4 34.9 33.6 26.3 - - -
Claude 3-Sonnet [37] 60.5 53.9 56.6 42.1 67.9 24.6 19.4
Claude 3-Opus [37] 63.8 60.52 60.5 43.4 70.2 26.9 23.9
GPT-4V [15] 80.9 75.0 71.7 71.0 59.2 28.4 27.7
15%
40%
60%
85%
0
0.5
1
1.5
2
2.5
3
VideoLLaMA
VideoChatGPT
VideoChat2
VideoChat
ST-LLM
GPT4V
Claude 3 Sonnet
Claude 3 Opus
Ratio
Accuracy
(a) (b)
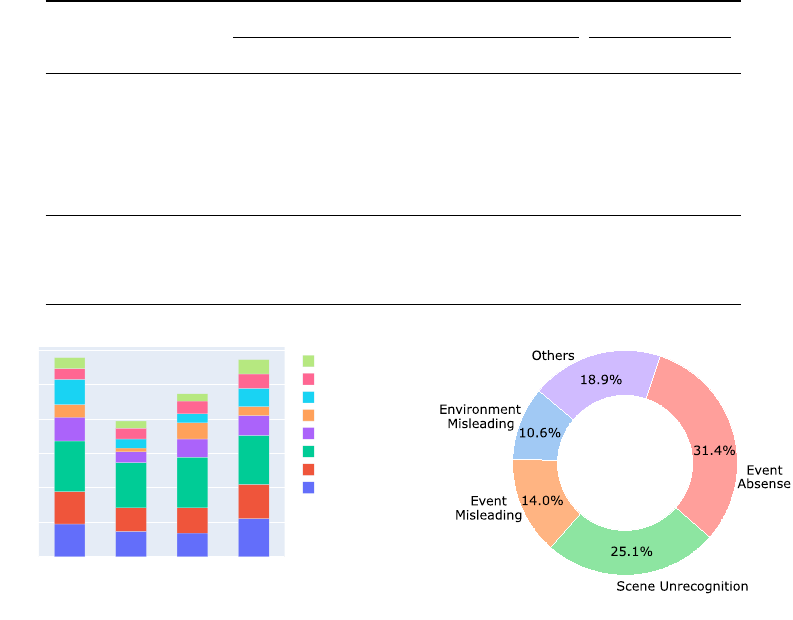
Figure 6: (a) The accuracies of Vript-RR questions regarding scenes at different timestamps (15%,
40%, 60%, and 85% of the video). (b) The reasons why the models (GPT-4V, Claude 3-Sonnet, and
Opus) sequence the events inaccurately in Vript-ERO.
9
5.3 Vript-ERO: A Temporal Understanding Benchmark of Long Videos
Re-ordering the Events in Different Timestamps There have been some benchmarks [
5
,
19
,
7
]
that test the temporal understanding ability of the models. Unfortunately, they focus on asking
questions about the temporal order of the actions happening in a short clip but few explore the
temporal understanding of events in the long videos. To fill the gap, we propose the Vript-ERO (Event
Re-ordering) task. We sample three distinct scenes (lasting 10s on average) in different timestamps
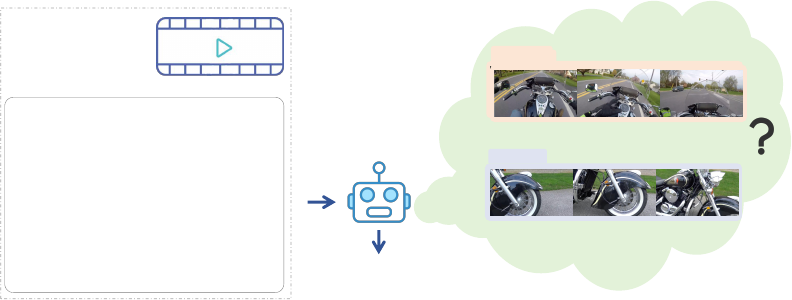
from a long video (varying from 2min to 2h) and shuffle their chronological order. As shown in
Figure 7, given the long video and the detailed descriptions of shuffled three scenes, the model is
required to give the correct temporal order of the scenes based on the understanding of the entire
video.
Scene B
Scene A
[Scene A] The video features a
close-up view of the front part of a
motorcycle ...
[Scene B] In the video, a scene
shows a rider operating a motorcycle
from a first-person perspective ...
What is the correct order of the
scenes?
Long
video
Text
["B", "A"]
Scene A
Figure 7: The overview of answering the question in Vript-ERO.
Evaluation In Table 4, "-" means these models fail to give answers. Different from previous tasks
that only have questions, Vript-ERO also contains long descriptions of scenes, which indicates these
models are weak in processing long instructions. For models having scores, they only give the correct
orders of all three scenes (@3) in about 20% of questions. In Figure 6 (b), we collect answers to the
questions that are answered incorrectly and analyze the reasons. We observe that the models can
be easily misled by the provided descriptions. For example, environment descriptions like sunlight
may imply the morning or evening, however, these events may come from different days in the video
rather than sequentially happening in one day. In 31.4% of cases, some events are absent in the input
frames due to the limitation of the number of input images for models like GPT-4V. Besides, in 25.1%
of cases, the models do not recognize which scene to be sequenced based on the descriptions.
6 Conclusion
We introduce Vript, a high-quality video-text dataset consisting of dense and detailed captions for
videos. Based on Vript, we train Vriptor, a top-performing video captioning model among open-
source models. Besides, we propose Vript-Hard, a challenging video understanding benchmark
evaluating hallucinations and the long video understanding ability of video LLMs.
Acknowledgement
Dongjie Yang and Hai Zhao are with the Department of Computer Science and Engineering, Shanghai
Jiao Tong University; Key Laboratory of Shanghai Education Commission for Intelligent Interaction
and Cognitive Engineering, Shanghai Jiao Tong University; Shanghai Key Laboratory of Trusted
Data Circulation and Governance in Web3.
This paper was completed during Dongjie Yang’s internship at Xiaohongshu Inc. and was partially
supported by the Joint Research Project of the Yangtze River Delta Science and Technology Innovation
Community (No. 2022CSJGG1400).
10
References
[1]
Haotian Liu, Chunyuan Li, Yuheng Li, Bo Li, Yuanhan Zhang, Sheng Shen, and Yong Jae Lee.
Llava-next: Improved reasoning, ocr, and world knowledge, January 2024.
[2]
Haotian Liu, Chunyuan Li, Qingyang Wu, and Yong Jae Lee. Visual instruction tuning. Advances
in neural information processing systems, 36, 2024.
[3]
Chenliang Li, Haiyang Xu, Junfeng Tian, Wei Wang, Ming Yan, Bin Bi, Jiabo Ye, Hehong
Chen, Guohai Xu, Zheng Cao, et al. mplug: Effective and efficient vision-language learning by
cross-modal skip-connections. arXiv preprint arXiv:2205.12005, 2022.
[4]
Pan Zhang, Xiaoyi Dong Bin Wang, Yuhang Cao, Chao Xu, Linke Ouyang, Zhiyuan Zhao,
Shuangrui Ding, Songyang Zhang, Haodong Duan, Hang Yan, et al. Internlm-xcomposer: A
vision-language large model for advanced text-image comprehension and composition. arXiv
preprint arXiv:2309.15112, 2023.
[5]
Muhammad Maaz, Hanoona Rasheed, Salman Khan, and Fahad Shahbaz Khan. Video-chatgpt:
Towards detailed video understanding via large vision and language models. arXiv preprint
arXiv:2306.05424, 2023.
[6]
Wenjing Wang, Huan Yang, Zixi Tuo, Huiguo He, Junchen Zhu, Jianlong Fu, and Jiaying Liu.
Videofactory: Swap attention in spatiotemporal diffusions for text-to-video generation. arXiv
preprint arXiv:2305.10874, 2023.
[7]
Kunchang Li, Yali Wang, Yinan He, Yizhuo Li, Yi Wang, Yi Liu, Zun Wang, Jilan Xu, Guo
Chen, Ping Luo, et al. Mvbench: A comprehensive multi-modal video understanding benchmark.
arXiv preprint arXiv:2311.17005, 2023.
[8]
Agrim Gupta, Lijun Yu, Kihyuk Sohn, Xiuye Gu, Meera Hahn, Li Fei-Fei, Irfan Essa, Lu Jiang,
and José Lezama. Photorealistic video generation with diffusion models, 2023.
[9]
Xin Ma, Yaohui Wang, Gengyun Jia, Xinyuan Chen, Ziwei Liu, Yuan-Fang Li, Cunjian
Chen, and Yu Qiao. Latte: Latent diffusion transformer for video generation. arXiv preprint
arXiv:2401.03048, 2024.
[10] OpenAI. Video generation models as world simulators. 2024.
[11]
Christoph Schuhmann, Richard Vencu, Romain Beaumont, Robert Kaczmarczyk, Clayton
Mullis, Aarush Katta, Theo Coombes, Jenia Jitsev, and Aran Komatsuzaki. Laion-400m: Open
dataset of clip-filtered 400 million image-text pairs. arXiv preprint arXiv:2111.02114, 2021.
[12]
Lin Chen, Jisong Li, Xiaoyi Dong, Pan Zhang, Conghui He, Jiaqi Wang, Feng Zhao, and Dahua
Lin. Sharegpt4v: Improving large multi-modal models with better captions. arXiv preprint
arXiv:2311.12793, 2023.
[13]
Max Bain, Arsha Nagrani, Gül Varol, and Andrew Zisserman. Frozen in time: A joint video
and image encoder for end-to-end retrieval. In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 1728–1738, 2021.
[14]
Tsai-Shien Chen, Aliaksandr Siarohin, Willi Menapace, Ekaterina Deyneka, Hsiang wei Chao,
Byung Eun Jeon, Yuwei Fang, Hsin-Ying Lee, Jian Ren, Ming-Hsuan Yang, and Sergey
Tulyakov. Panda-70m: Captioning 70m videos with multiple cross-modality teachers, 2024.
[15] OpenAI. Gpt-4 technical report. arXiv preprint arXiv:2303.08774, 2023.
[16]
Jun Xu, Tao Mei, Ting Yao, and Yong Rui. Msr-vtt: A large video description dataset for
bridging video and language. In Proceedings of the IEEE conference on computer vision and
pattern recognition, pages 5288–5296, 2016.
[17] OpenAI. Improving image generation with better caption. 2023.
[18]
Karttikeya Mangalam, Raiymbek Akshulakov, and Jitendra Malik. Egoschema: A diagnostic
benchmark for very long-form video language understanding, 2023.
[19]
Junbin Xiao, Xindi Shang, Angela Yao, and Tat-Seng Chua. Next-qa: Next phase of question-
answering to explaining temporal actions. In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition, pages 9777–9786, 2021.
[20]
Muhammad Maaz, Hanoona Rasheed, Salman Khan, and Fahad Shahbaz Khan. Video-chatgpt:
Towards detailed video understanding via large vision and language models, 2023.
11
[21]
Antoine Miech, Dimitri Zhukov, Jean-Baptiste Alayrac, Makarand Tapaswi, Ivan Laptev, and
Josef Sivic. Howto100m: Learning a text-video embedding by watching hundred million
narrated video clips. In Proceedings of the IEEE/CVF international conference on computer
vision, pages 2630–2640, 2019.
[22]
Sangho Lee, Jiwan Chung, Youngjae Yu, Gunhee Kim, Thomas Breuel, Gal Chechik, and
Yale Song. Acav100m: Automatic curation of large-scale datasets for audio-visual video
representation learning. In Proceedings of the IEEE/CVF International Conference on Computer
Vision, pages 10274–10284, 2021.
[23] Hongwei Xue, Tiankai Hang, Yanhong Zeng, Yuchong Sun, Bei Liu, Huan Yang, Jianlong Fu,
and Baining Guo. Advancing high-resolution video-language representation with large-scale
video transcriptions. In Proceedings of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 5036–5045, 2022.
[24]
David L. Chen and William B. Dolan. Collecting highly parallel data for paraphrase evaluation.
In Proceedings of the 49th Annual Meeting of the Association for Computational Linguistics
(ACL-2011), Portland, OR, June 2011.
[25]
Lisa Anne Hendricks, Oliver Wang, Eli Shechtman, Josef Sivic, Trevor Darrell, and Bryan
Russell. Localizing moments in video with natural language, 2017.
[26]
Fabian Caba Heilbron, Victor Escorcia, Bernard Ghanem, and Juan Carlos Niebles. Activitynet:
A large-scale video benchmark for human activity understanding. In Proceedings of the ieee
conference on computer vision and pattern recognition, pages 961–970, 2015.
[27]
Luowei Zhou, Chenliang Xu, and Jason J. Corso. Towards automatic learning of procedures
from web instructional videos, 2017.
[28]
Xin Wang, Jiawei Wu, Junkun Chen, Lei Li, Yuan-Fang Wang, and William Yang Wang. Vatex:
A large-scale, high-quality multilingual dataset for video-and-language research. In Proceedings
of the IEEE/CVF International Conference on Computer Vision, pages 4581–4591, 2019.
[29]
Kunchang Li, Yinan He, Yi Wang, Yizhuo Li, Wenhai Wang, Ping Luo, Yali Wang, Limin Wang,
and Yu Qiao. Videochat: Chat-centric video understanding. arXiv preprint arXiv:2305.06355,
2023.
[30]
Hang Zhang, Xin Li, and Lidong Bing. Video-llama: An instruction-tuned audio-visual language
model for video understanding, 2023.
[31]
Alec Radford, Jong Wook Kim, Tao Xu, Greg Brockman, Christine McLeavey, and Ilya
Sutskever. Robust speech recognition via large-scale weak supervision, 2022.
[32]
Ruyang Liu, Chen Li, Haoran Tang, Yixiao Ge, Ying Shan, and Ge Li. St-llm: Large language
models are effective temporal learners, 2024.
[33]
Ruyang Liu, Chen Li, Haoran Tang, Yixiao Ge, Ying Shan, and Ge Li. St-llm: Large language
models are effective temporal learners. https://arxiv.org/abs/2404.00308, 2023.
[34]
Junnan Li, Dongxu Li, Silvio Savarese, and Steven Hoi. Blip-2: Bootstrapping language-image
pre-training with frozen image encoders and large language models. In International conference
on machine learning, pages 19730–19742. PMLR, 2023.
[35]
Wenliang Dai, Junnan Li, Dongxu Li, Anthony Meng Huat Tiong, Junqi Zhao, Weisheng
Wang, Boyang Li, Pascale Fung, and Steven Hoi. Instructblip: Towards general-purpose
vision-language models with instruction tuning, 2023.
[36]
Jinze Bai, Shuai Bai, Shusheng Yang, Shijie Wang, Sinan Tan, Peng Wang, Junyang Lin, Chang
Zhou, and Jingren Zhou. Qwen-vl: A versatile vision-language model for understanding,
localization, text reading, and beyond, 2023.
[37] Anthropic. The claude 3 model family: Opus, sonnet, haiku. 2024.
[38]
Yifan Li, Yifan Du, Kun Zhou, Jinpeng Wang, Wayne Xin Zhao, and Ji-Rong Wen. Evaluating
object hallucination in large vision-language models, 2023.
[39]
Hanchao Liu, Wenyuan Xue, Yifei Chen, Dapeng Chen, Xiutian Zhao, Ke Wang, Liping Hou,
Rongjun Li, and Wei Peng. A survey on hallucination in large vision-language models, 2024.
[40]
Tianyu Yu, Yuan Yao, Haoye Zhang, Taiwen He, Yifeng Han, Ganqu Cui, Jinyi Hu, Zhiyuan
Liu, Hai-Tao Zheng, Maosong Sun, et al. Rlhf-v: Towards trustworthy mllms via behavior
12
alignment from fine-grained correctional human feedback. arXiv preprint arXiv:2312.00849,
2023.
[41]
Kishore Papineni, Salim Roukos, Todd Ward, and Wei-Jing Zhu. Bleu: a method for automatic
evaluation of machine translation. In Proceedings of the 40th annual meeting of the Association
for Computational Linguistics, pages 311–318, 2002.
[42]
Chin-Yew Lin. Rouge: A package for automatic evaluation of summaries. In Text summarization
branches out, pages 74–81, 2004.
[43]
Ramakrishna Vedantam, C Lawrence Zitnick, and Devi Parikh. Cider: Consensus-based image
description evaluation. In Proceedings of the IEEE conference on computer vision and pattern
recognition, pages 4566–4575, 2015.
[44]
Xuyang Shen, Dong Li, Jinxing Zhou, Zhen Qin, Bowen He, Xiaodong Han, Aixuan Li, Yuchao
Dai, Lingpeng Kong, Meng Wang, et al. Fine-grained audible video description. In Proceedings
of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 10585–10596,
2023.
[45]
Xiujie Song, Mengyue Wu, Kenny Q. Zhu, Chunhao Zhang, and Yanyi Chen. A cognitive
evaluation benchmark of image reasoning and description for large vision language models,
2024.
[46]
Lianmin Zheng, Wei-Lin Chiang, Ying Sheng, Siyuan Zhuang, Zhanghao Wu, Yonghao Zhuang,
Zi Lin, Zhuohan Li, Dacheng Li, Eric P. Xing, Hao Zhang, Joseph E. Gonzalez, and Ion Stoica.
Judging llm-as-a-judge with mt-bench and chatbot arena, 2023.
[47] Greg Kamradt. Needle in a haystack - pressure testing llms. 2024.
[48] Hugo Touvron, Thibaut Lavril, Gautier Izacard, Xavier Martinet, Marie-Anne Lachaux, Timo-
thée Lacroix, Baptiste Rozière, Naman Goyal, Eric Hambro, Faisal Azhar, Aurelien Rodriguez,
Armand Joulin, Edouard Grave, and Guillaume Lample. Llama: Open and efficient foundation
language models, 2023.
[49]
Hugo Touvron, Louis Martin, Kevin Stone, Peter Albert, Amjad Almahairi, Yasmine Babaei,
Nikolay Bashlykov, Soumya Batra, Prajjwal Bhargava, Shruti Bhosale, Dan Bikel, Lukas
Blecher, Cristian Canton Ferrer, Moya Chen, Guillem Cucurull, David Esiobu, Jude Fernandes,
Jeremy Fu, Wenyin Fu, Brian Fuller, Cynthia Gao, Vedanuj Goswami, Naman Goyal, Anthony
Hartshorn, Saghar Hosseini, Rui Hou, Hakan Inan, Marcin Kardas, Viktor Kerkez, Madian
Khabsa, Isabel Kloumann, Artem Korenev, Punit Singh Koura, Marie-Anne Lachaux, Thibaut
Lavril, Jenya Lee, Diana Liskovich, Yinghai Lu, Yuning Mao, Xavier Martinet, Todor Mihaylov,
Pushkar Mishra, Igor Molybog, Yixin Nie, Andrew Poulton, Jeremy Reizenstein, Rashi Rungta,
Kalyan Saladi, Alan Schelten, Ruan Silva, Eric Michael Smith, Ranjan Subramanian, Xiao-
qing Ellen Tan, Binh Tang, Ross Taylor, Adina Williams, Jian Xiang Kuan, Puxin Xu, Zheng
Yan, Iliyan Zarov, Yuchen Zhang, Angela Fan, Melanie Kambadur, Sharan Narang, Aurelien
Rodriguez, Robert Stojnic, Sergey Edunov, and Thomas Scialom. Llama 2: Open foundation
and fine-tuned chat models, 2023.
A Limitation and Potential Risk
A.1 Limitation
We utilize advanced models like GPT-4V [
15
] to annotate the data in this paper, where GPT-4V
sometimes generates inaccurate descriptions and hallucinations. For the Vript dataset, we do not
check whether the descriptions are correct or not manually, where there may exist hallucinations from
GPT-4V. For Vript-Hard for evaluation, we have carefully inspected and revised the content that is
inaccurate and inappropriate manually, reducing the errors to the greatest extent.
A.2 Potential Risk
For the Vript and Vript-Hard, we collect videos from YouTube and TikTok that may contain personal
information and copyrighted items. Therefore, people using the Vript or Vript-Hard should respect
the privacy and copyrights of the video owner and strictly agree to the license in Appendix B.
13

B License
By downloading or using the data or models, you understand, acknowledge, and agree to all the terms
in the following agreement.
ACADEMIC USE ONLY Any content from Vript/Vript-Hard dataset and Vriptor model is avail-
able for academic research purposes only. You agree not to reproduce, duplicate, copy, trade, or
exploit for any commercial purposes
NO DISTRIBUTION Respect the privacy of personal information of the original source. Without
the permission of the copyright owner, you are not allowed to perform any form of broadcasting,
modification or any other similar behavior to the data set content.
RESTRICTION AND LIMITATION OF LIABILITY In no event shall we be liable for any
other damages whatsoever arising out of the use of, or inability to use this dataset and its associated
software, even if we have been advised of the possibility of such damages.
DISCLAIMER You are solely responsible for legal liability arising from your improper use of the
dataset content. We reserve the right to terminate your access to the dataset at any time. You should
delete the Vript/Vript-Hard dataset or Vriptor model if required.
You must comply with all terms and conditions of these original licenses, including but not limited to
the OpenAI Terms of Use, the Copyright Rules & Policies of YouTube or TikTok and the specific
licenses for base language models for checkpoints (e.g. Llama-1/2 community license [
48
,
49
],
Vicuna [
46
], and ST-LLM [
33
]). This project does not impose any additional constraints beyond
those stipulated in the original licenses.
C Vript Dataset Construction
C.1 Preprocessing
We leverage the PySceneDetect to split the video into scenes by detecting breaks in-between content
and moments where the video fades to black. Most of the scenes last from 3s to 1min despite some
super long scenes. For each scene, we sample different numbers of frames according to the scene
duration: 1) 3 frames for shorter than 6s; 2) 4 frames for shorter than 30s; 3) 5 frames for longer
scenes.
C.2 Automatic Annotation
We input multiple images as a video into the GPT-4V. Besides the video frames, we transcribe the
voice-over into text using the Whisper model of medium size implemented by FasterWhisper
5
. As
shown in Table 5, we use the frames along with the transcription and the video title as the entire input
of the video. We also use Claude 3 Sonnet which has a looser constraint on the video content to
annotate the remaining scenes that GPT-4V refuses to give a response.
D Vriptor Training
Based on the ST-LLM [
33
], we continue training the model in two stages using the paradigms
mentioned in Section 4. At stage 1, for type 3) and type 4) in Figure 2 of multiple scenes, we sample
2~6 successive scenes and concatenate them to form a long video. By doing concatenation, we
additionally synthesize 200K long videos and corresponding "sub-scripts", dubbed Vript-Extend. If
there are keywords ("voice-over", "say", "narrative", etc) in the captions, we append the voice-over
transcription to the end of video frames as the input. We train the model for 1 epoch on Vript and
Vript-Extend with a total of 600k video clips, which costs about 500 A100 80GB GPU hours. At
stage 2, we continually train the model of stage 1 to empower it to generate dense captions for
significantly longer videos. We sample 9~20 successive scenes and synthesize 20K video clips that
5
https://github.com/SYSTRAN/faster-whisper
14
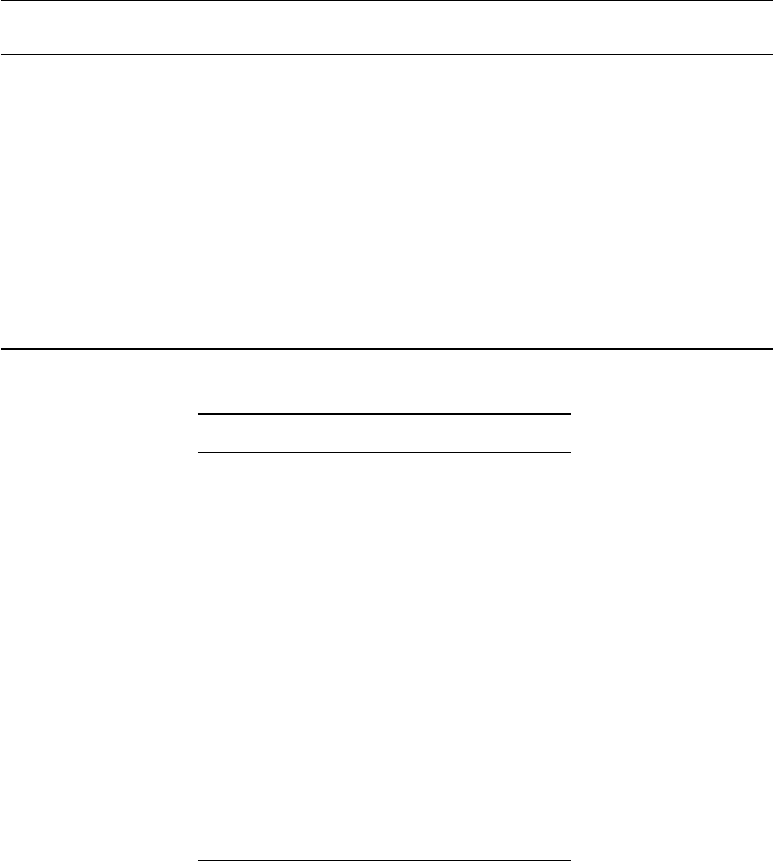
Table 5: An example of the prompt for generating captions in Vript.
System:You are an excellent video director that can help me analyze
the given video clip.
User: <frame 1> <frame 2> ... <frame n>
Voice-over:"{voice-over}"
Based on the voice-over and successive frames from the video titled
"{title}" above, please describe:
1) the shot type (15 words)
2) the camera movement (15 words)
3) what is happening as detailed as possible (e.g. plots,
characters’ actions, environment, light, all objects, what they look
like, colors, style, etc.) (150 words)
4) Summarize the content to title the scene (10 words)
Directly return in the json format like this: {"shot_type": "...",
"camera_movement": "...", "content": "...", "scene_title": "..."}.
Do not describe the frames individually but the whole clip.
Table 6: Training hyperparameters of Vriptor
Config Stage 1 Stage 2
input frame 16 64
input resolution 224 224
max voice-over length 512 2048
max output length 1024 4096
rope scaling factor 1.0 4.0
rope scaling type - dynamic
learning rate 2e-5 2e-5
learning rate schedule constant constant
warmup ratio 0.03 0.05
batch size 128 64
epoch 1 1
Qformer state frozen frozen
Qformer queries 32 32
ViT state frozen frozen
are much longer than stage 1. As shown in Table 6, we quadruple the input frames to 64. We train on
longer videos incorporating 3% of replay data from stage 1 for 1 epoch, which costs about 60 A100
80GB GPU hours.
In Figure 9 and Figure 10, we showcase some examples of the captions generated by Vriptor. Vriptor
is capable of generating general or dense descriptions for both short (<20s) and long videos (>1min).
E Vript-Hard Construction
E.1 Vript-HAL
Data Construction In order to build Vript-HAL with detailed and high-quality ground truth
captions, we carefully select meaningful video clips and annotate the clips with GPT-4V. The
meaningful clips here mean that the clips contain several scenes or various events and last longer
than 10s, which are filtered by humans. For each clip, we extract ten high-resolution frames, where
ten is the maximum number of images allowed for the input of GPT-4V. We input these frames along
15
with a prompt that makes GPT-4 output longer captions containing more details than those in the
Vript training dataset. As the GPT-4V sometimes generates captions with hallucinations, to ensure
the reliability of Vript-HAL, we carefully revise the hallucinations and additionally add more details
to captions by watching the clip manually. We annotate each clip twice using two distinct sampling
strategies. The first strategy samples at 5%, 15%, ..., 85%, 95% of the clip and the second samples at
1%, 10%, ..., 80%, 90% of the clip. We make sure that two captions for every clip contain most of the
details in the clips so that the calculation of precision score for hallucination evaluation is reliable.
If we merge two captions into one, it can be considered as a longer caption of approximately 400
unique words, which would be 40x longer than the captions in MSR-VTT [
16
] and 20x longer than
Panda-70M [14].
T h e v i e w f r o m
the handlebars of
a motorcycle as
it drives down a
street.
Panda-70M
Vript-HAL
The video clip features a rider operating a motorcycle, presumably an Indian brand bike, from a
first-person perspective. The bike has a classic design with chrome detailing and black leather
elements. The rider's hands are visible, wearing bright gloves, manipulating the bike's controls.
We see a clear windshield, a well-kept dashboard with gauges, and the front part of the bike,
including the headlight, which may have extra lights - a detail the voice-over is uncertain about.
The environment is a suburban street during the daytime with green lawns, houses, and passing
cars. The sky is overcast. The rider comments on starting the bike with the choke and their
perplexity about the 'Indian' aspect of the motorcycle, while also noting its coolness. There are no
other characters in sight; the focus is on the rider's experience and interaction with the bike.
Figure 8: Comparison between the ground truth captions in Panda-70M and Vript-HAL.
E.2 Vript-RR
Data Construction Each piece of data in Vript-RR consists of a video, a hint, and a corresponding
question. The hint and the question are related to a certain scene in the long video. Therefore, we first
extract scenes from the video and specially extract four scenes in the 15%, 40%, 60%, and 85% of
the video separately to construct four questions at different timestamps per video. We construct four
questions per video instead of one question per video because we also want to explore if the temporal
positions of the scenes in the video will influence the results of Vript-RR, as illustrated in Section 5.2.
We leverage GPT-4V to generate the hints and the questions for extracted scenes. Given a description
of the extracted scene, GPT-4V is prompted to first mask a certain object or character in the description
and then ask a question about the masked part. We leverage the masked description generated by
GPT-4V as the hint. However, most of the questions generated can not meet the standard of Vript-RR.
Humans filter and revise most of the generated questions and hints to make up the Vript-RR finally.
Data Composition As shown in Figure 5, the model accepts the input consisting of a long video,
a hint, and a question. The model has to first retrieve the related scene according to the hint and
then answer the question. As shown in Table 7, we design various questions that evaluate models’
different abilities. Each question requires at least one step of processing or reasoning rather than
simply watching the video, which is challenging for most video LLMs.
E.3 Vript-ERO
Data Construction We sample three unique scenes that only happen once from the long videos
(lasting 2min to 2h). Each scene lasts for 10s on average. As shown in Figure 7, we input the
descriptions of the shuffled scenes along with the long video and ask the model the give the correct
temporal order.
16
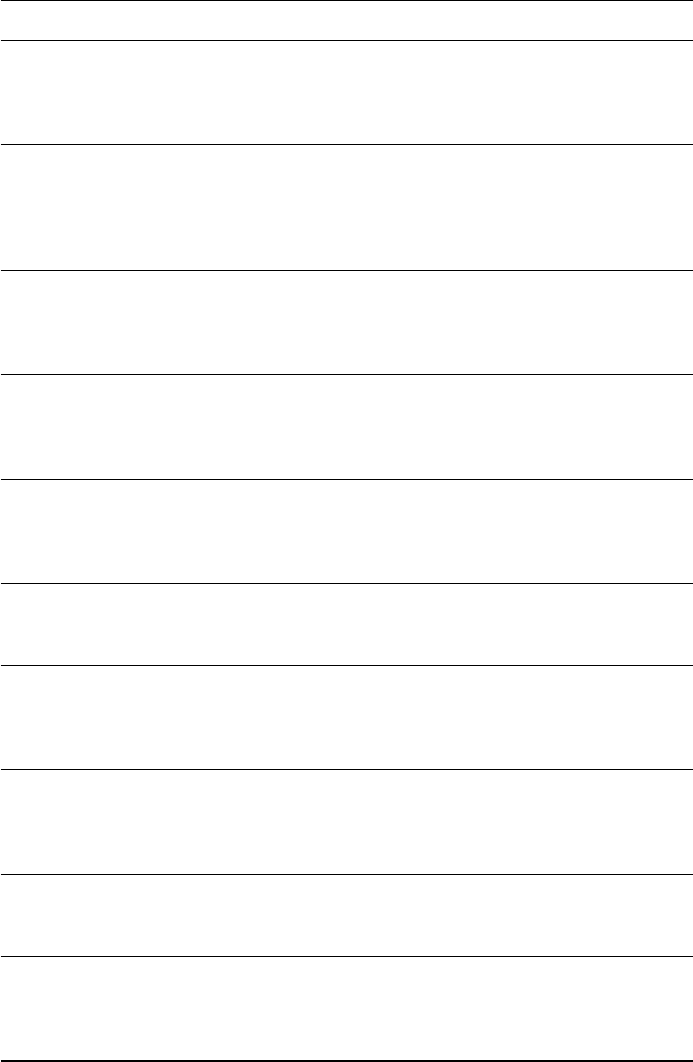
Table 7: Examples of questions in Vript-RR.
Category Hint Question Answer
Object
. . . a gas station comes into view
on the right side of the road with
a label "50%" visible at the bot-
tom . . .
What is the name of this
gas station visible in the
distance?
Shell gas
station
Position
A man wearing a black shirt
with red and white text, is likely
affiliated with a brand or eatery
. . .
There is an old woman
with white hair wear-
ing a black jacket sitting
right behind the man,
what is she doing?
having a
meal
Text
. . . spread ideas worth sharing.
There’s an image being pro-
jected which includes a title
card featuring a name . . .
What is the name of the
speaker of this presenta-
tion?
Adam
Bernier
Color
. . . a rider operating a motorcy-
cle from a first-person perspec-
tive. The bike has a classic de-
sign. . .
What is the color of the
rider’s clothing from the
side mirror of the motor-
cycle?
black and
light yel-
low/green
and grey
Count
A diverse group of individuals,
possibly co-workers, are lined
up with a row and dressed in
casual business attire . . .
Which is more in the
scene shown, girls or
boys?
girls
Implicit
A person is capturing himself
and partially other individuals
beside him . . .
What object is the left
hand of the person hold-
ing?
camera
Emotion
. . . an individual inside an older
model car on the railway, with
his hands pressed against the
window in a gesture . . .
What emotion does this
gesture convey?
urgency or
distress or
fear
Action
. . . park’s environment. It’s fo-
cused on a pair of individuals
engaged in a shared activity, sit-
ting on . . .
What are these two indi-
viduals doing while sit-
ting on the bench-like
structure?
watching
the smart-
phones
Fact
. . . a casually dressed man in
dark colors is seen loading
items into a spacious trunk . . .
What is the brand of the
white vehicle?
Chevrolet
Cognition
. . . a central figure in black who
is receiving touches and hugs
. . .
What is the likely sce-
nario or event that this
central figure is experi-
encing?
being elim-
inated from
a show
17

Vriptor-S (scene-by-scene)
[Scene 1/3: Playful Encounter Between Cat and Monkey](Duration: [0.0, 5.2]/17.0s)
The video features a cat and a monkey interacting in an outdoor setting, likely a garden or yard
with dirt ground and sparse greenery. The cat, with white fur and black patches, is initially seen
walking away from the camera towards the monkey. The monkey, with light brown fur, appears to
be attempting to climb onto the cat's back. However, the cat seems uninterested and walks past
the monkey without acknowledgment. Subsequently, the cat turns around and faces the monkey,
who is now standing on its hind legs trying to reach the cat's head. The environment is brightly lit
by natural daylight, suggesting it's daytime. There are no other significant objects or characters in
the scene.
[Scene 2/3: Curious Cat Observes Monkey's Climbing Attempt](Duration: [5.2, 12.7]/17.0s)
The scene takes place outdoors, likely in a garden or yard with dirt ground and sparse grass. A
monkey is attempting to climb a concrete wall, while a cat watches from the ground. The monkey,
with light brown fur and dark limbs, struggles to ascend the vertical surface. The cat, with white
fur and black patches, observes the monkey's actions with interest. In the background, there are
trees and bushes indicating a natural environment. The lighting suggests it's daytime with natural
sunlight. As the monkey fails to climb the wall, it falls onto the ground. The cat remains stationary
throughout the sequence. The colors in the scene are muted with earthy tones dominating due to
the natural setting.
[Scene 3/3: Cat Observes Monkey's Hanging on the Tree](Duration: [12.7, 17.0]/17.0s)
In an outdoor setting with dirt ground and sparse vegetation, a monkey is attempting to climb a
tree branch. The monkey, with light brown fur and dark limbs, struggles to grip the branch. A cat,
with white fur and black patches, watches intently from the ground. The cat's attention is focused
on the monkey's actions. The environment appears to be a garden or yard during the daytime,
with natural sunlight casting shadows on the ground. There are no other objects or characters in
the immediate vicinity, drawing the viewer's attention solely to the interaction between the
monkey and the cat. The colors in the scene are muted, with earthy tones dominating due to the
natural setting.
Vriptor-W (whole-video)
The video features an outdoor setting with natural lighting, showcasing a playful interaction
between a cat and a monkey. The environment appears to be a concrete area with some greenery
in the background, suggesting an urban park or garden. The cat is white with brown patches,
while the monkey has a reddish-brown fur coat. In the first frame, the cat is standing on its hind
legs, front paws reaching up towards the monkey as if trying to climb it. In the second frame, the
cat is sitting on the ground, looking up at the monkey with an attentive stance. The third frame
captures the cat from behind, gazing towards the monkey, who is now hanging upside down from
a tree branch. The final frame shows the monkey swinging towards the cat from the branch.
Figure 9: An example of the caption generated by Vriptor.
18
Vriptor-S (scene-by-scene)
[Scene 1/6: Casual Stroll and Burger King Visit](Duration: [0.0, 5.9]/45.9s)
The clip opens with a close-up of a hand holding a smartphone, displaying an array of colorful emojis on the
screen. The focus then shifts to a medium shot of a person from behind as they walk down a street lined with
various shops and pedestrians. The person is wearing a plaid shirt and jeans, suggesting a casual outing. The
environment appears to be an urban setting during daytime, with clear skies and ample sunlight enhancing the
vibrant colors of the surroundings. As the camera follows the person's movement, it captures glimpses of local
life and businesses, including what seems to be a Burger King restaurant in the background, indicating a
commercial area. The overall atmosphere is lively and bustling with activity.
[Scene 2/6: Exploring New Delhi's Street Food Scene](Duration: [5.9, 13.0]/45.9s)
The clip begins with a medium close-up of a person sitting at a table in what appears to be a fast-food restaurant,
given the presence of a menu and food packaging. The individual is interacting with someone off-camera,
possibly ordering food. The scene transitions to a point-of-view shot where the person is holding a green burger
wrapped in paper, about to take a bite. The environment suggests an indoor setting with artificial lighting that
casts a warm hue over the scene. The final shot is a close-up of a hand pointing at a sign advertising 'Bubble
Tea', indicating the exploration of local street food options. The sign is colorful with red accents, and there's a
glimpse of a brightly patterned tablecloth, suggesting a casual dining atmosphere.
[Scene 3/6: Enjoying Bubble Tea in Cozy Cafe](Duration: [13.0, 17.8]/45.9s)
The video features a close-up of a person's hand holding a glass filled with a creamy, frothy beverage, likely
bubble tea, given the visible tapioca pearls. The drink is served in a clear glass with a straw, placed on a table
with a colorful patterned tablecloth. The environment suggests a casual dining setting, possibly a cafe or street
food stall. The lighting is bright and natural, indicating daytime. In the background, there are indistinct chatter
and ambient sounds that suggest other patrons are present. The person is wearing a plaid shirt, suggesting a
laid-back or casual attire. The overall color palette consists of warm tones from the beverage and cooler hues
from the surroundings.
[Scene 4/6: Busy Street Food Stall Ambiance](Duration: [17.8, 23.0]/45.9s)
The clip opens with a medium shot of a busy street food stall named 'Dona Orginal'. A vendor is seen preparing
food, surrounded by various cooking utensils and ingredients. The environment is bustling with activity; people
can be seen walking by in the background, indicating a lively urban setting. The lighting is natural, suggesting
daytime, and the colors are vibrant, with the reds of the stall contrasting against the more muted tones of the
surroundings. The vendor is dressed in casual clothing, focused on his task. The camera then cuts to a close-up
of a hand holding a small aluminum foil container filled with dumplings, showcasing the food item in detail. The
final shot is a close-up of a person seated outdoors, holding and eating a dumpling, emphasizing the food's
texture and taste.
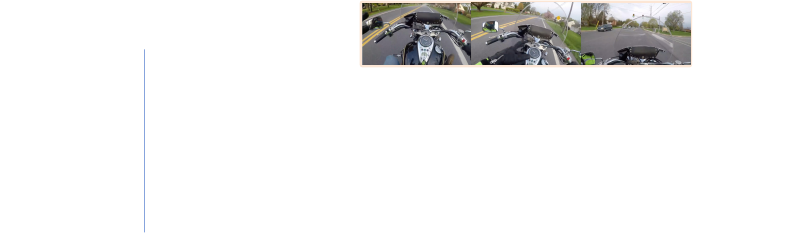
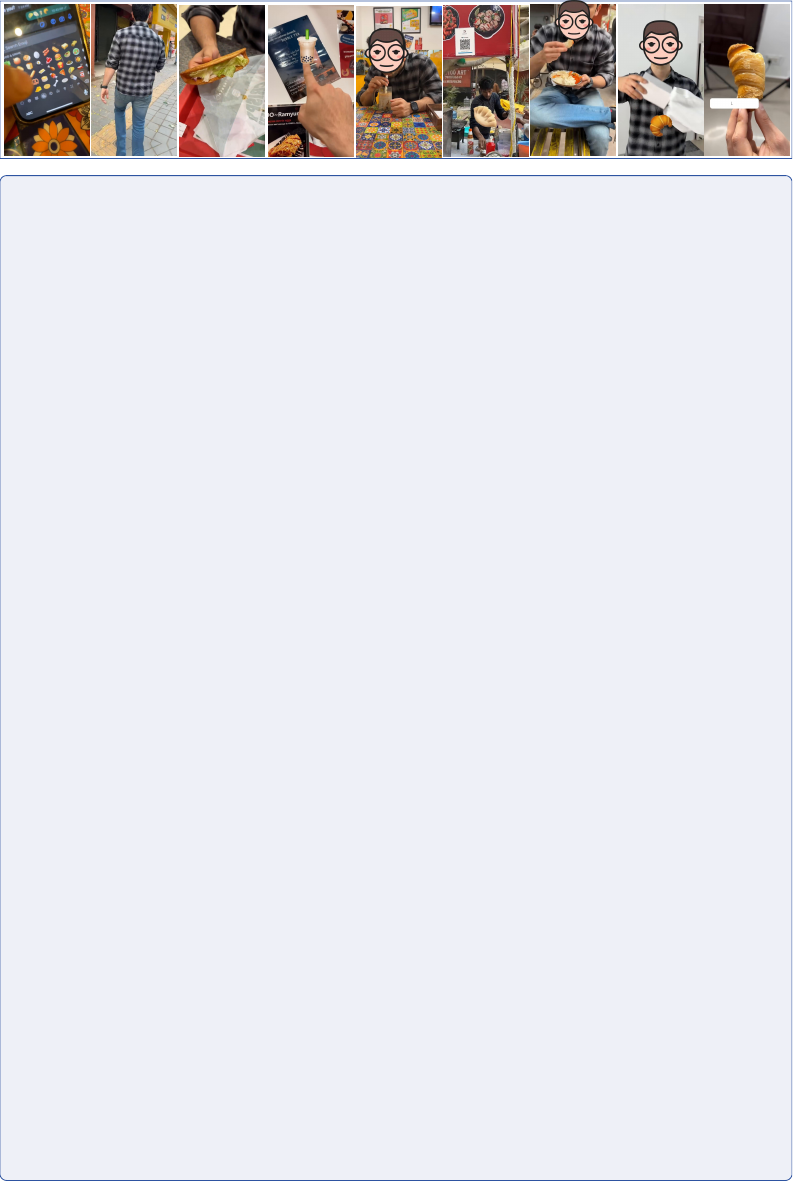
[Scene 5/6: Tasting Creamy Croissant at Outdoor Eatery](Duration: [23.0, 29.6]/45.9s)
The scene takes place outdoors, likely in a casual dining area with ambient daylight providing natural illumination.
A person is seated, wearing a checkered shirt, and holding a croissant. The croissant appears to be freshly
baked, with a golden-brown crust indicative of a flaky pastry. As the person bites into the croissant, the voice-
over expresses approval of its creamy interior. The environment seems relaxed with other patrons in the
background, suggesting this might be a street food setting or an open-air cafe. The colors are warm and inviting,
with the golden hue of the croissant standing out against the more muted tones of the surroundings.
[Scene 6/6: Leaving a Commendable Croissant](Duration: [29.6, 45.9]/45.9s)
The scene takes place indoors, likely in a kitchen or dining area, evidenced by the presence of a white
refrigerator in the background. The subject, wearing a checkered shirt, is holding a croissant, which they appear
to be enjoying. The croissant is golden-brown, indicating it might be freshly baked. As they take bites, the voice-
over expresses appreciation for the croissant's quality, suggesting it's commendable. The lighting is bright and
natural, suggesting daytime. No other objects or people are in focus, keeping the viewer's attention solely on the
croissant and the subject's interaction with it. The colors are warm, with the golden hue of the croissant
contrasting against the neutral tones of the room and the subject's checkered shirt.
Figure 10: Another example of the caption generated by Vriptor.
19
